GM1 CAT.POL.H.205(b)(4) Take-off
CAA ORS9 Decision No. 1
THE APPLICATION OF TODRH
(a) Introduction
Original definitions for helicopter performance were derived from aeroplanes; hence, the definition of take-off distance owes much to operations from runways. Helicopters on the other hand can operate from runways, confined and restricted areas and rooftop FATOs — all bounded by obstacles. As an analogy, this is equivalent to a take-off from a runway with obstacles on and surrounding it.
It can, therefore, be said that unless the original definitions from aeroplanes are tailored for helicopters, the flexibility of the helicopter might be constrained by the language of operational performance.
This GM concentrates on the critical term ‘take-off distance required (TODRH)’ and describes the methods to achieve compliance with it and, in particular, the alternative procedure described in ICAO Annex 6 Attachment A 4.1.1.3:
(1) the take-off distance required does not exceed the take-off distance available; or
(2) as an alternative, the take-off distance required may be disregarded provided that the helicopter with the critical engine failure recognised at TDP can, when continuing the take-off, clear all obstacles between the end of the take-off distance available and the point at which it becomes established in a climb at VTOSS by a vertical margin of 10.7 m (35 ft) or more. An obstacle is considered to be in the path of the helicopter if its distance from the nearest point on the surface below the intended line of flight does not exceed 30 m or 1.5 times the maximum dimension of the helicopter, whichever is greater.
(b) Definition of TODRH
The definition of TODRH from Annex I is as follows:
‘Take-off distance required (TODRH)’ in the case of helicopters means the horizontal distance required from the start of the take-off to the point at which take-off safety speed (VTOSS), a selected height and a positive climb gradient are achieved, following failure of the critical engine being recognised at the TDP, the remaining engines operating within approved operating limits.
AMC1 CAT.POL.H.205(b)(4) states how the specified height should be determined. The original definition of TODRH was based only on the first part of this definition.
(c) The clear area procedure (runway)
In the past, helicopters certified in Category A would have had, at the least, a ‘clear area’ procedure. This procedure is analogous to an aeroplane Category A procedure and assumes a runway (either metalled or grass) with a smooth surface suitable for an aeroplane take-off (see Figure 1).
The helicopter is assumed to accelerate down the FATO (runway) outside of the height velocity (HV) diagram. If the helicopter has an engine failure before TDP, it must be able to land back on the FATO (runway) without damage to helicopter or passengers; if there is a failure at or after TDP the aircraft is permitted to lose height — providing it does not descend below a specified height above the surface (usually 15 ft if the TDP is above 15 ft). Errors by the pilot are taken into consideration, but the smooth surface of the FATO limits serious damage if the error margin is eroded (e.g. by a change of wind conditions).
Figure 1
Clear Area take – off
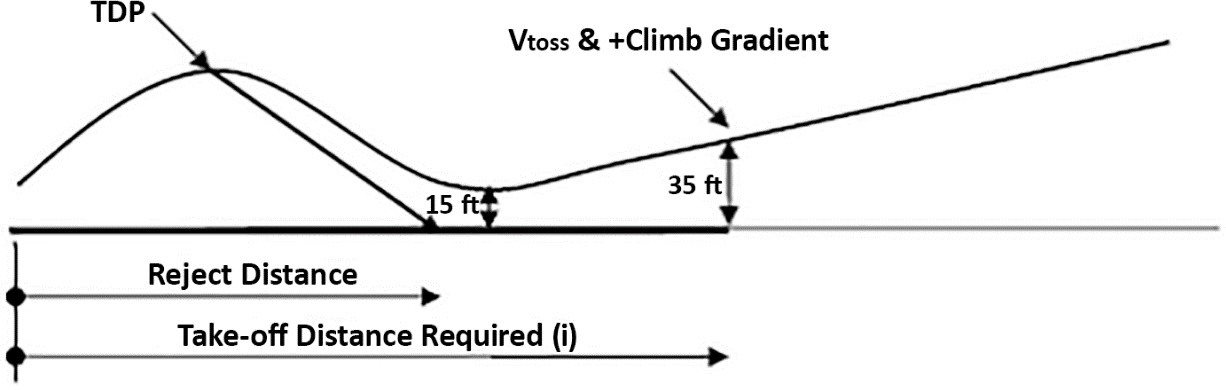
The operator only has to establish that the distances required are within the distance available (take-off distance and reject distance). The original definition of TODRH meets this case exactly.
From the end of the TODRH obstacle clearance is given by the climb gradient of the first or second climb segment meeting the requirement of CAT.POL.H.210 (or for performance class 2 (PC2): CAT.POL.H.315). The clearance margin from obstacles in the take-off flight path takes account of the distance travelled from the end of the take-off distance required and operational conditions (IMC or VMC).
(d) Category A procedures other-than-clear area
Procedures other-than-the-clear area are treated somewhat differently. However, the short field procedure is somewhat of a hybrid as either (a) or (b) of AMC1 CAT.POL.H.205(b)(4) can be utilised (the term ‘helipad’ is used in the following section to illustrate the principle only, it is not intended as a replacement for ‘aerodrome’ or ‘FATO’).
(1) Limited area, restricted area and helipad procedures (other than elevated)
The exact names of the procedure used for other-than-clear area are as many as there are manufacturers. However, principles for obstacle clearance are generic and the name is unimportant.
These procedures (see Figure 2 and Figure 3) are usually associated with an obstacle in the continued take-off area — usually shown as a line of trees or some other natural obstacle. As clearance above such obstacles is not readily associated with an accelerative procedure, as described in (c), a procedure using a vertical climb (or a steep climb in the forward, sideways or rearward direction) is utilised.
Figure 2
Short Field take-off
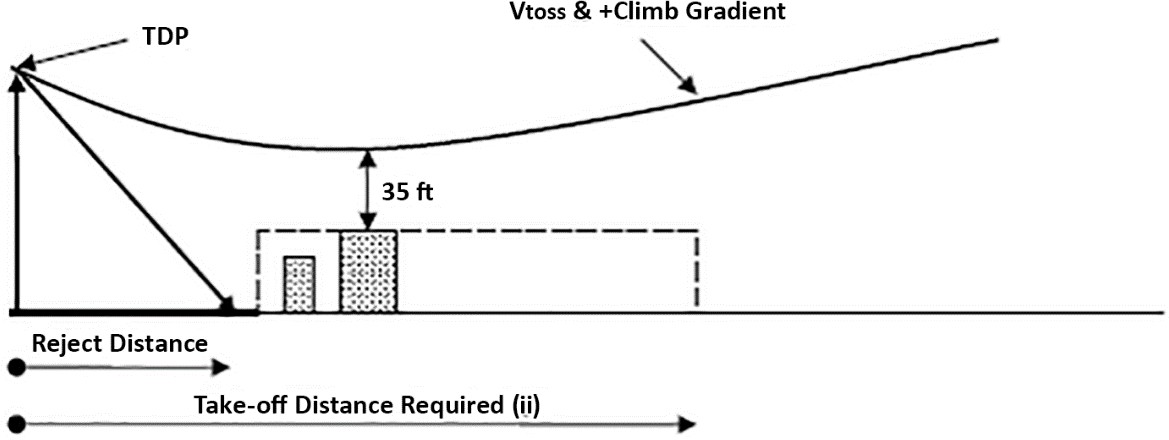
With the added complication of a TDP principally defined by height together with obstacles in the continued take off area, a drop down to within 15 ft of the take-off surface is not deemed appropriate and the required obstacle clearance is set to 35 ft (usually called ‘min-dip’). The distance to the obstacle does not need to be calculated (provided it is outside the rejected distance required), as clearance above all obstacles is provided by ensuring that helicopter does not descend below the min-dip associated with a level defined by the highest obstacle in the continued take-off area.
Figure 3
Helipad take-off
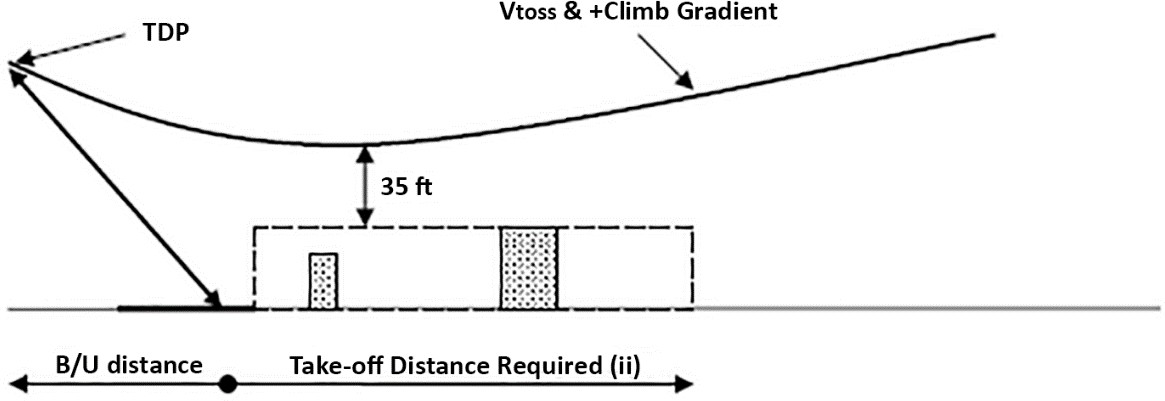
These procedures depend upon (b) of AMC1 CAT.POL.H.205(b)(4).
As shown in Figure 3, the point at which VTOSS and a positive rate of climb are met defines the TODRH. Obstacle clearance from that point is assured by meeting the requirement of CAT.POL.H.210 (or for PC2, CAT.POL.H.315). Also shown in Figure 3 is the distance behind the helipad which is the backup distance (B/U distance).
(2) Elevated helipad procedures
The elevated helipad procedure (see Figure 4) is a special case of the ground level helipad procedure discussed above.
Figure 4
Elevate Helipad take-off
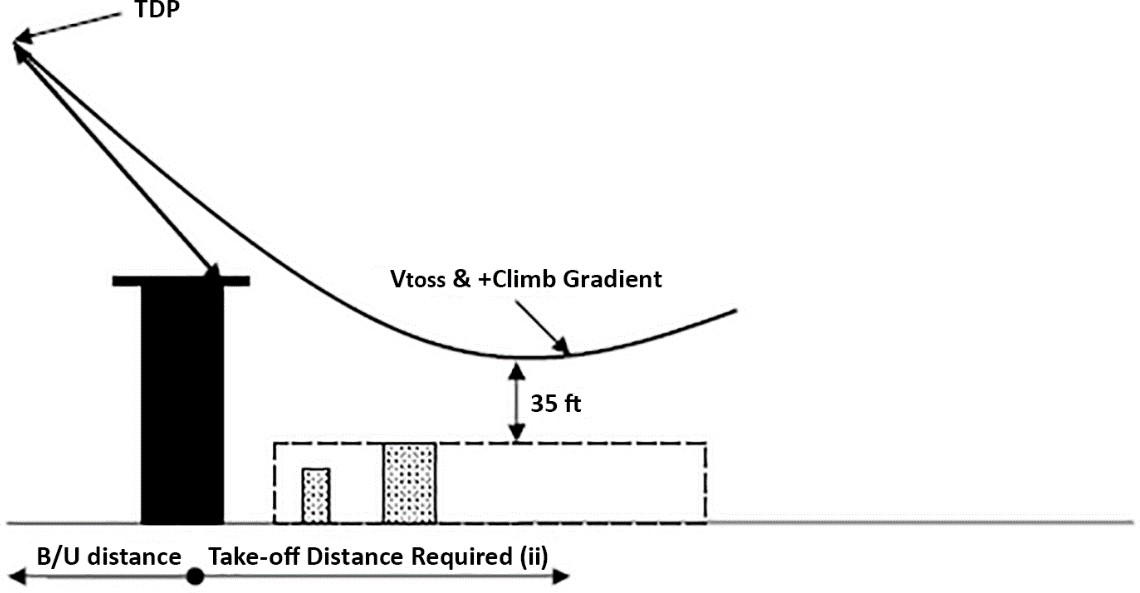
The main difference is that drop down below the level of the take-off surface is permitted. In the drop down phase, the Category A procedure ensures deck-edge clearance but, once clear of the deck-edge, the 35 ft clearance from obstacles relies upon the calculation of drop down. Subparagraph (b) of AMC1 CAT.POL.H.205(b)(4) is applied.
Although 35 ft is used throughout the requirements, it may be inadequate at particular elevated FATOs that are subject to adverse airflow effects, turbulence, etc.